近日,我國人工智能學會理事長、我國工程院院士李德毅來到坐落中關村開展大廈的鋼鐵俠科技,環繞運動腦的形式化及架構規劃進行內部共享,提出十項雙足大仿人機器人形式化準則,并在運動腦的構造上提出寶貴意見。
早在上一年6月,李德毅院士就很看好鋼鐵俠科技的雙足大仿人機器人及機器人運動腦,并與鋼鐵俠科技正式簽署合作協議,在鋼鐵俠科技建立院士工作站,幫助鋼鐵俠科技加速仿人機器人“運動腦”研制及推行。他以為“這種機器人在人機交互和雜亂地勢的習慣方面有天然優勢。假如運動平衡問題處理得好,再用人工智能技術當大腦,仿人機器人將具有寬廣的使用場景和無窮的商業化價值,不光能夠在機場、酒店、養老等效勞職業寬廣使用,在高校教具、娛樂影視、軍用配備等方面也具有主要價值”。
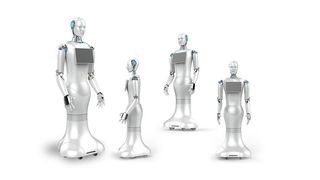
現在鋼鐵俠科技的研制人員自立完成了兩代仿人機器人全體規劃和開發、單獨規劃步態算法,處理了高精度電機驅動器、姿勢傳感器、機器人操控器和多種通訊傳輸模塊等機器人中心零部件,完成了仿人機器人用雙腿行走。第三代也在研制過程中,添加更多自由度,模塊化規劃可根據使用者的請求進行詳細拆分組合試驗。鋼鐵俠科技為機器人體系供給中心元器件以及全體處理方案,可廣泛使用于工業操控、職業勘測、日子效勞職業。
李德毅院士以為,機器人運動過程中要以自個為認知主體,對周圍環境信息有選擇性的進行坐標系切換和信息判別,機器人的做法也能夠像人一樣充溢不確定性以及根本確定性。會上他也與鋼鐵俠科技的團隊人員交流了自個做駕馭腦的心得體會,為鋼鐵俠科技的運動腦供給了更多經歷學習。
在看完鋼鐵俠科技ART雙足大仿人機器人什物后,李德毅院士表明,鋼鐵俠科技在人工智能領域不盲目跟風,做鮮有人敢做的雙足大仿人機器人并能夠做的精密,具有寬廣的市場前景,能夠推進人工智能工業的開展,超越發達國家的效勞機器人水平指日可下。